Sakelar Batas Goyang Kumparan Ujung Plastik

-

Perumahan Kokoh
-

Tindakan yang Andal
-

Kehidupan yang Lebih Baik
Deskripsi Produk
Sakelar batas miniatur seri RL8 dari Renew menawarkan daya tahan dan ketahanan yang lebih baik terhadap lingkungan yang keras, dengan masa pakai mekanis hingga 10 juta operasi. Hal ini menjadikannya ideal untuk aplikasi kritis dan tugas berat di mana sakelar dasar standar tidak akan mencukupi. Dengan batang pegas yang fleksibel, sakelar batas goyang koil dapat dioperasikan dalam berbagai arah (kecuali arah aksial), mengakomodasi ketidaksejajaran. Sangat cocok untuk mendeteksi objek yang mendekat dari berbagai sudut. Ujung plastik dan ujung kawat tersedia untuk berbagai aplikasi.
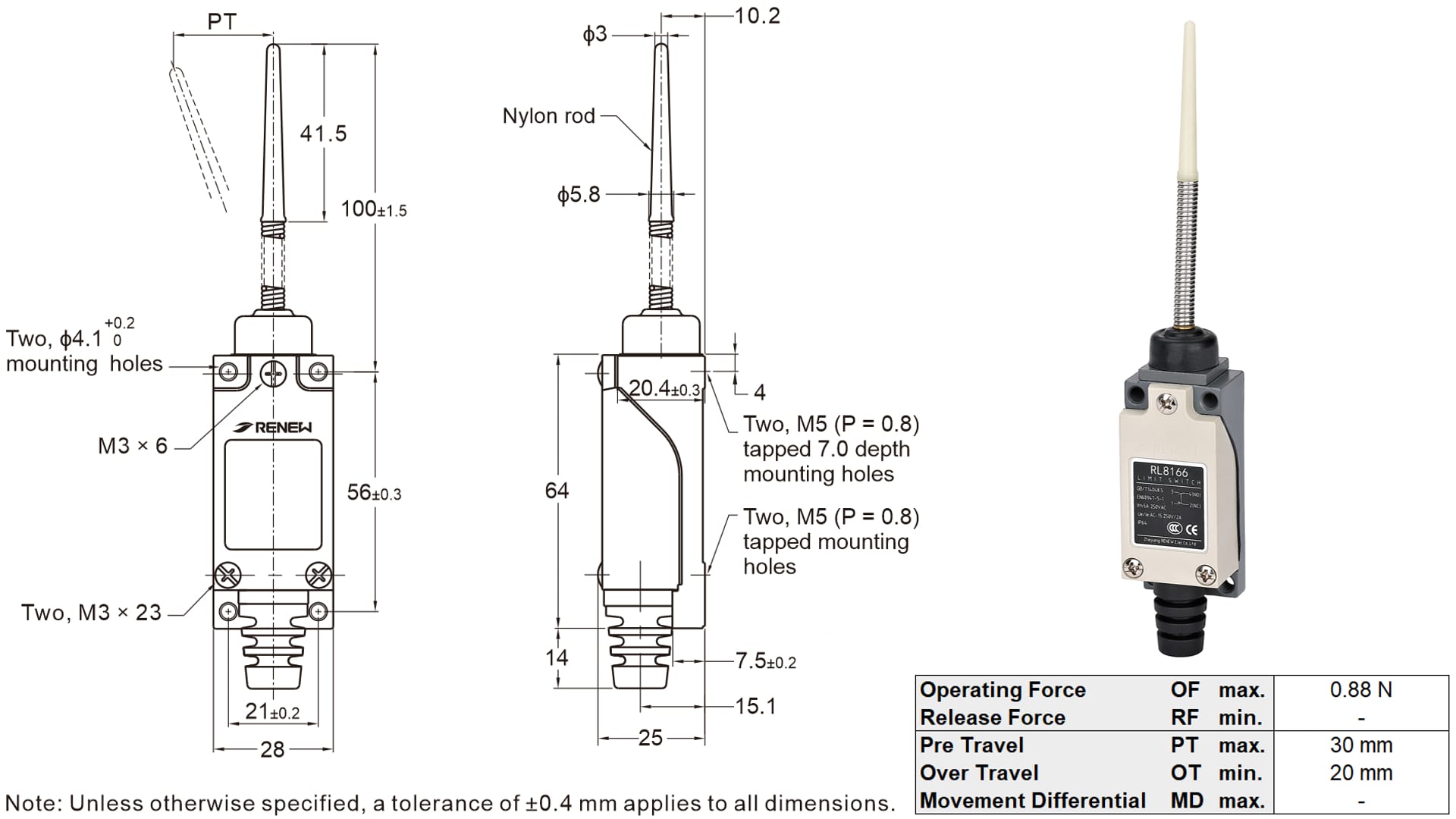
Dimensi dan Karakteristik Operasional
Data Teknis Umum
| Peringkat Ampere | 5 A, 250 VAC |
| Resistansi isolasi | Minimal 100 MΩ (pada 500 VDC) |
| Resistansi kontak | 25 mΩ maks. (nilai awal) |
| Kekuatan dielektrik | Antara kontak dengan polaritas yang sama 1.000 VAC, 50/60 Hz selama 1 menit |
| Antara bagian logam yang menghantarkan arus dan tanah, serta antara setiap terminal dan bagian logam yang tidak menghantarkan arus. 2.000 VAC, 50/60 Hz selama 1 menit | |
| Ketahanan terhadap getaran untuk mencegah kerusakan. | 10 hingga 55 Hz, amplitudo ganda 1,5 mm (kerusakan: maksimal 1 ms) |
| Umur mekanis | Minimal 10.000.000 operasi (120 operasi/menit) |
| Kehidupan listrik | Minimal 300.000 operasi (di bawah beban resistansi nominal) |
| Tingkat perlindungan | Serbaguna: IP64 |
Aplikasi
Saklar batas miniatur Renew memainkan peran penting dalam memastikan keamanan, presisi, dan keandalan berbagai perangkat di berbagai bidang. Berikut beberapa aplikasi populer atau potensial.

Logistik dan proses pergudangan
Di gudang dan pabrik modern, sakelar batas ini dapat digunakan pada mesin pengemasan untuk mendeteksi paket berbentuk tidak beraturan yang bergerak di atas konveyor. Batang fleksibel akan menekuk sesuai bentuk paket, sehingga memicu sakelar. Sakelar ini juga dapat digunakan dalam robotika dan sistem otomatis untuk mendeteksi posisi akhir lengan robot atau bagian bergerak yang mungkin tidak selalu sejajar sempurna.













